त्वरित पोस्टसाठी आमच्या सोशल मीडियाची सदस्यता घ्या.
तंत्रज्ञानातील अभूतपूर्व प्रगतीच्या काळात, नेव्हिगेशन सिस्टीम पायाभूत आधारस्तंभ म्हणून उदयास आल्या, ज्यामुळे असंख्य प्रगती झाल्या, विशेषतः अचूकता-महत्वाच्या क्षेत्रांमध्ये. प्राथमिक खगोलीय नेव्हिगेशनपासून ते अत्याधुनिक इनर्शियल नेव्हिगेशन सिस्टीम (INS) पर्यंतचा प्रवास मानवतेच्या अन्वेषण आणि अचूकतेसाठीच्या अथक प्रयत्नांचे प्रतीक आहे. हे विश्लेषण INS च्या गुंतागुंतीच्या यांत्रिकीमध्ये खोलवर जाते, फायबर ऑप्टिक जायरोस्कोप (FOGs) च्या अत्याधुनिक तंत्रज्ञानाचा आणि फायबर लूपच्या देखभालीमध्ये ध्रुवीकरणाची महत्त्वाची भूमिका एक्सप्लोर करते.
भाग १: इनर्शियल नेव्हिगेशन सिस्टीम्स (INS) समजून घेणे:
इनर्शियल नेव्हिगेशन सिस्टीम्स (INS) हे स्वायत्त नेव्हिगेशनल एड्स म्हणून वेगळे दिसतात, जे बाह्य संकेतांपासून स्वतंत्रपणे वाहनाचे स्थान, दिशा आणि वेग अचूकपणे मोजतात. या सिस्टीम गती आणि रोटेशनल सेन्सर्सशी सुसंगत असतात, प्रारंभिक वेग, स्थिती आणि दिशा यासाठी संगणकीय मॉडेल्ससह अखंडपणे एकत्रित होतात.
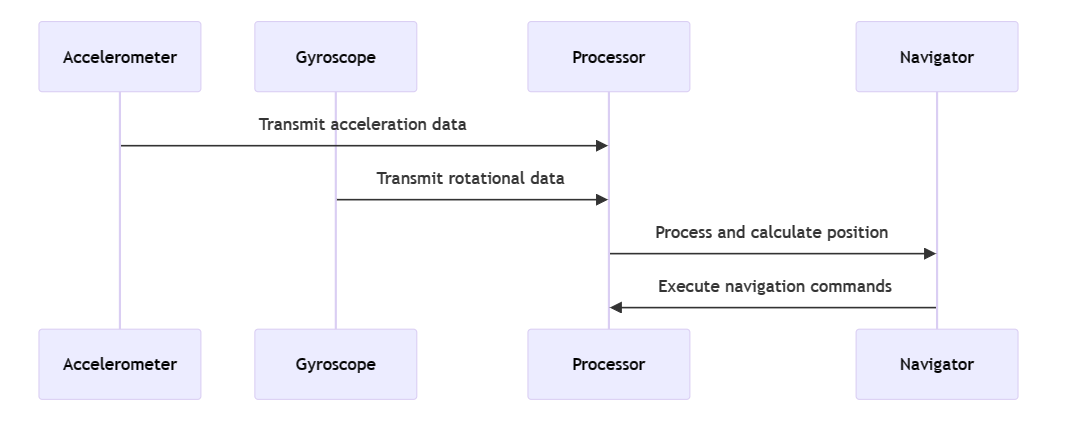
एका आर्केटाइपल आयएनएसमध्ये तीन मुख्य घटक असतात:
· अॅक्सेलेरोमीटर: हे महत्त्वाचे घटक वाहनाच्या रेषीय प्रवेगाची नोंद करतात, गतीचे मोजण्यायोग्य डेटामध्ये रूपांतर करतात.
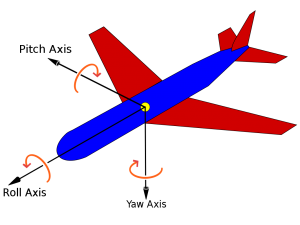
· जायरोस्कोप: कोनीय वेग निश्चित करण्यासाठी अविभाज्य, हे घटक सिस्टम ओरिएंटेशनसाठी महत्त्वपूर्ण आहेत.
· संगणक मॉड्यूल: आयएनएसचे तंत्रिका केंद्र, रिअल-टाइम पोझिशनल अॅनालिटिक्स मिळविण्यासाठी बहुआयामी डेटावर प्रक्रिया करते.
बाह्य अडथळ्यांपासून INS ची प्रतिकारशक्ती संरक्षण क्षेत्रात ते अपरिहार्य बनवते. तथापि, ते 'वाहत्या'शी झुंजते - हळूहळू अचूकता क्षय, ज्यामुळे त्रुटी कमी करण्यासाठी सेन्सर फ्यूजन सारख्या अत्याधुनिक उपायांची आवश्यकता असते (चॅटफील्ड, १९९७).
भाग २. फायबर ऑप्टिक जायरोस्कोपची ऑपरेशनल डायनॅमिक्स:
फायबर ऑप्टिक जायरोस्कोप (FOGs) प्रकाशाच्या हस्तक्षेपाचा फायदा घेत रोटेशनल सेन्सिंगमध्ये एका परिवर्तनकारी युगाची सुरुवात करतात. त्यांच्या गाभ्यामध्ये अचूकता असल्याने, FOGs हे एरोस्पेस वाहनांच्या स्थिरीकरण आणि नेव्हिगेशनसाठी महत्त्वाचे आहेत.
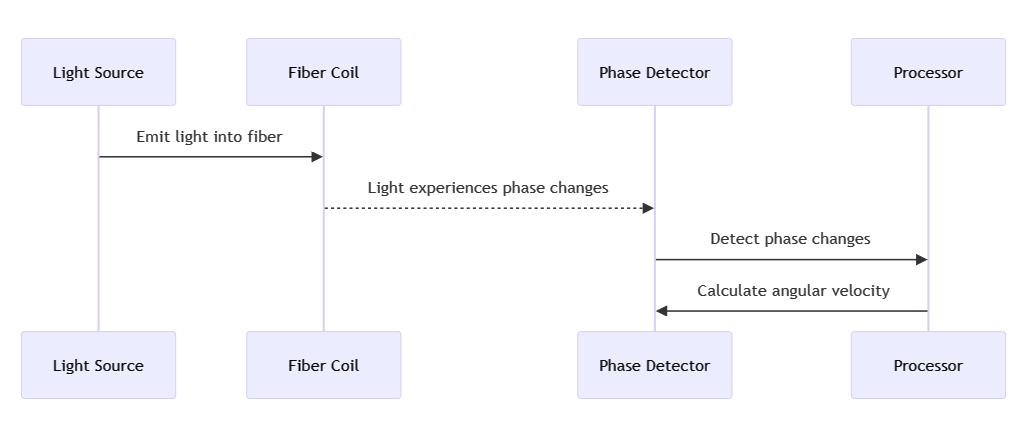
एफओजी सॅग्नाक इफेक्टवर काम करतात, जिथे प्रकाश, फिरत्या फायबर कॉइलमध्ये विरुद्ध दिशेने प्रवास करत, रोटेशनल रेट बदलांशी संबंधित फेज शिफ्ट प्रकट करतो. ही सूक्ष्म यंत्रणा अचूक कोनीय वेग मेट्रिक्समध्ये अनुवादित होते.
आवश्यक घटकांमध्ये हे समाविष्ट आहे:
· प्रकाश स्रोत: सुरुवातीचा बिंदू, सामान्यतः लेसर, जो सुसंगत प्रकाश प्रवास सुरू करतो.
· फायबर कॉइल: एक गुंडाळलेला ऑप्टिकल कंड्युट, प्रकाशाचा मार्ग वाढवतो, ज्यामुळे सॅग्नाक प्रभाव वाढतो.
· फोटोडिटेक्टर: हा घटक प्रकाशाच्या गुंतागुंतीच्या हस्तक्षेपाच्या नमुन्यांची ओळख पटवतो.
भाग ३: फायबर लूप राखण्यासाठी ध्रुवीकरणाचे महत्त्व:
ध्रुवीकरण देखभाल (पीएम) फायबर लूप, जे एफओजीसाठी आवश्यक आहेत, प्रकाशाची एकसमान ध्रुवीकरण स्थिती सुनिश्चित करतात, जे हस्तक्षेप पॅटर्न अचूकतेमध्ये एक प्रमुख निर्धारक आहे. हे विशेष तंतू, ध्रुवीकरण मोड डिस्पर्शनशी लढा देऊन, एफओजी संवेदनशीलता आणि डेटा प्रामाणिकपणा वाढवतात (केर्सी, १९९६).
पीएम फायबरची निवड, ऑपरेशनल अत्यावश्यकता, भौतिक गुणधर्म आणि प्रणालीगत सुसंवाद यानुसार, व्यापक कामगिरी मापदंडांवर प्रभाव पाडते.
भाग ४: अनुप्रयोग आणि अनुभवजन्य पुरावे:
पर्यावरणीय अनिश्चिततेमध्ये मानवरहित हवाई मोहिमा आयोजित करण्यापासून ते चित्रपटसृष्टीत स्थिरता सुनिश्चित करण्यापर्यंत, विविध अनुप्रयोगांमध्ये FOGs आणि INS ला अनुनाद मिळतो. त्यांच्या विश्वासार्हतेचा पुरावा म्हणजे NASA च्या मार्स रोव्हर्समध्ये त्यांची तैनाती, जे अयशस्वी-सुरक्षित परग्रही नेव्हिगेशन सुलभ करते (मैमोन, चेंग आणि मॅथीज, २००७).
बाजारपेठेतील मार्गक्रमण या तंत्रज्ञानासाठी वाढत्या स्थानाचा अंदाज लावतात, ज्यामध्ये संशोधन वेक्टर सिस्टम लवचिकता, अचूकता मॅट्रिक्स आणि अनुकूलता स्पेक्ट्रा (मार्केटसँडमार्केट्स, २०२०) मजबूत करण्याच्या उद्देशाने असतील.

रिंग लेसर जायरोस्कोप
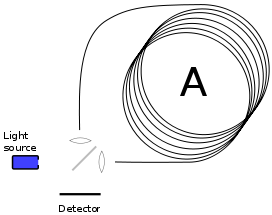
सॅग्नाक परिणामावर आधारित फायबर-ऑप्टिक-गायरोस्कोपची योजना
संदर्भ:
- चॅटफील्ड, एबी, १९९७.उच्च अचूकता इनर्शियल नेव्हिगेशनची मूलभूत तत्त्वे.अॅस्ट्रोनॉटिक्स अँड एरोनॉटिक्समधील प्रगती, खंड १७४. रेस्टन, व्हीए: अमेरिकन इन्स्टिट्यूट ऑफ एरोनॉटिक्स अँड एरोनॉटिक्स.
- केर्सी, एडी, इत्यादी, १९९६. "फायबर ऑप्टिक गायरोस: तंत्रज्ञानाच्या प्रगतीची २० वर्षे," इनIEEE ची कार्यवाही,८४(१२), पृ. १८३०-१८३४.
- मैमोन, एमडब्ल्यू, चेंग, वाय., आणि मॅथीज, एल., २००७. "मंगळ शोध रोव्हर्सवरील दृश्यमान ओडोमेट्री - अचूक ड्रायव्हिंग आणि विज्ञान प्रतिमा सुनिश्चित करण्यासाठी एक साधन,"आयईईई रोबोटिक्स आणि ऑटोमेशन मासिक,१४(२), पृ. ५४-६२.
- मार्केट्सअँडमार्केट्स, २०२०. "ग्रेड, तंत्रज्ञान, अनुप्रयोग, घटक आणि प्रदेशानुसार इनर्शियल नेव्हिगेशन सिस्टम मार्केट - २०२५ पर्यंतचा जागतिक अंदाज."
अस्वीकरण:
- आम्ही येथे घोषित करतो की आमच्या वेबसाइटवर प्रदर्शित केलेल्या काही प्रतिमा इंटरनेट आणि विकिपीडियावरून शिक्षण आणि माहिती सामायिक करण्याच्या उद्देशाने गोळा केल्या आहेत. आम्ही सर्व मूळ निर्मात्यांच्या बौद्धिक संपदा अधिकारांचा आदर करतो. या प्रतिमा व्यावसायिक फायद्याच्या हेतूने वापरल्या जात नाहीत.
- जर तुम्हाला वाटत असेल की वापरलेली कोणतीही सामग्री तुमच्या कॉपीराइटचे उल्लंघन करते, तर कृपया आमच्याशी संपर्क साधा. बौद्धिक संपदा कायदे आणि नियमांचे पालन सुनिश्चित करण्यासाठी आम्ही योग्य उपाययोजना करण्यास तयार आहोत, ज्यामध्ये प्रतिमा काढून टाकणे किंवा योग्य श्रेय देणे समाविष्ट आहे. आमचे उद्दिष्ट असे व्यासपीठ राखणे आहे जे सामग्रीने समृद्ध, निष्पक्ष आणि इतरांच्या बौद्धिक संपदा अधिकारांचा आदर करणारे असेल.
- कृपया खालील संपर्क पद्धतीद्वारे आमच्याशी संपर्क साधा,email: sales@lumispot.cn. कोणतीही सूचना मिळाल्यावर आम्ही त्वरित कारवाई करण्यास वचनबद्ध आहोत आणि अशा कोणत्याही समस्या सोडवण्यासाठी १००% सहकार्य सुनिश्चित करतो.
पोस्ट वेळ: ऑक्टोबर-१८-२०२३