वातावरणीय शोध पद्धती
वातावरणीय शोधण्याच्या मुख्य पद्धती आहेत: मायक्रोवेव्ह रडार ध्वनी पद्धत, हवेतील किंवा रॉकेट ध्वनी पद्धत, ध्वनी बलून, उपग्रह रिमोट सेन्सिंग आणि LIDAR. मायक्रोवेव्ह रडार लहान कण शोधू शकत नाही कारण वातावरणात पाठवलेले मायक्रोवेव्ह मिलिमीटर किंवा सेंटीमीटर लाटा असतात, ज्यांची तरंगलांबी लांब असते आणि ते लहान कणांशी, विशेषतः विविध रेणूंशी संवाद साधू शकत नाहीत.
हवेतून आणि रॉकेटमधून ध्वनी काढण्याच्या पद्धती अधिक महाग असतात आणि त्या दीर्घकाळ निरीक्षण करता येत नाहीत. फुग्यांमधून ध्वनी काढण्याचा खर्च कमी असला तरी, वाऱ्याच्या वेगामुळे त्यांच्यावर जास्त परिणाम होतो. उपग्रह रिमोट सेन्सिंगद्वारे ऑन-बोर्ड रडार वापरून जागतिक वातावरण मोठ्या प्रमाणात शोधता येते, परंतु अवकाशीय रिझोल्यूशन तुलनेने कमी असते. वातावरणात लेसर बीम उत्सर्जित करून आणि वातावरणातील रेणू किंवा एरोसोल आणि लेसरमधील परस्परसंवाद (विखुरणे आणि शोषण) वापरून वातावरणीय मापदंड मिळविण्यासाठी लिडारचा वापर केला जातो.
लेसरची मजबूत दिशात्मकता, कमी तरंगलांबी (मायक्रॉन वेव्ह) आणि अरुंद पल्स रुंदी आणि फोटोडिटेक्टर (फोटोमल्टीप्लायर ट्यूब, सिंगल फोटॉन डिटेक्टर) ची उच्च संवेदनशीलता यामुळे, लिडार उच्च अचूकता आणि वातावरणीय पॅरामीटर्सचे उच्च स्थानिक आणि ऐहिक रिझोल्यूशन शोध प्राप्त करू शकते. त्याच्या उच्च अचूकतेमुळे, उच्च स्थानिक आणि ऐहिक रिझोल्यूशन आणि सतत देखरेखीमुळे, LIDAR वातावरणीय एरोसोल, ढग, वायू प्रदूषक, वातावरणीय तापमान आणि वाऱ्याचा वेग शोधण्यात वेगाने विकसित होत आहे.
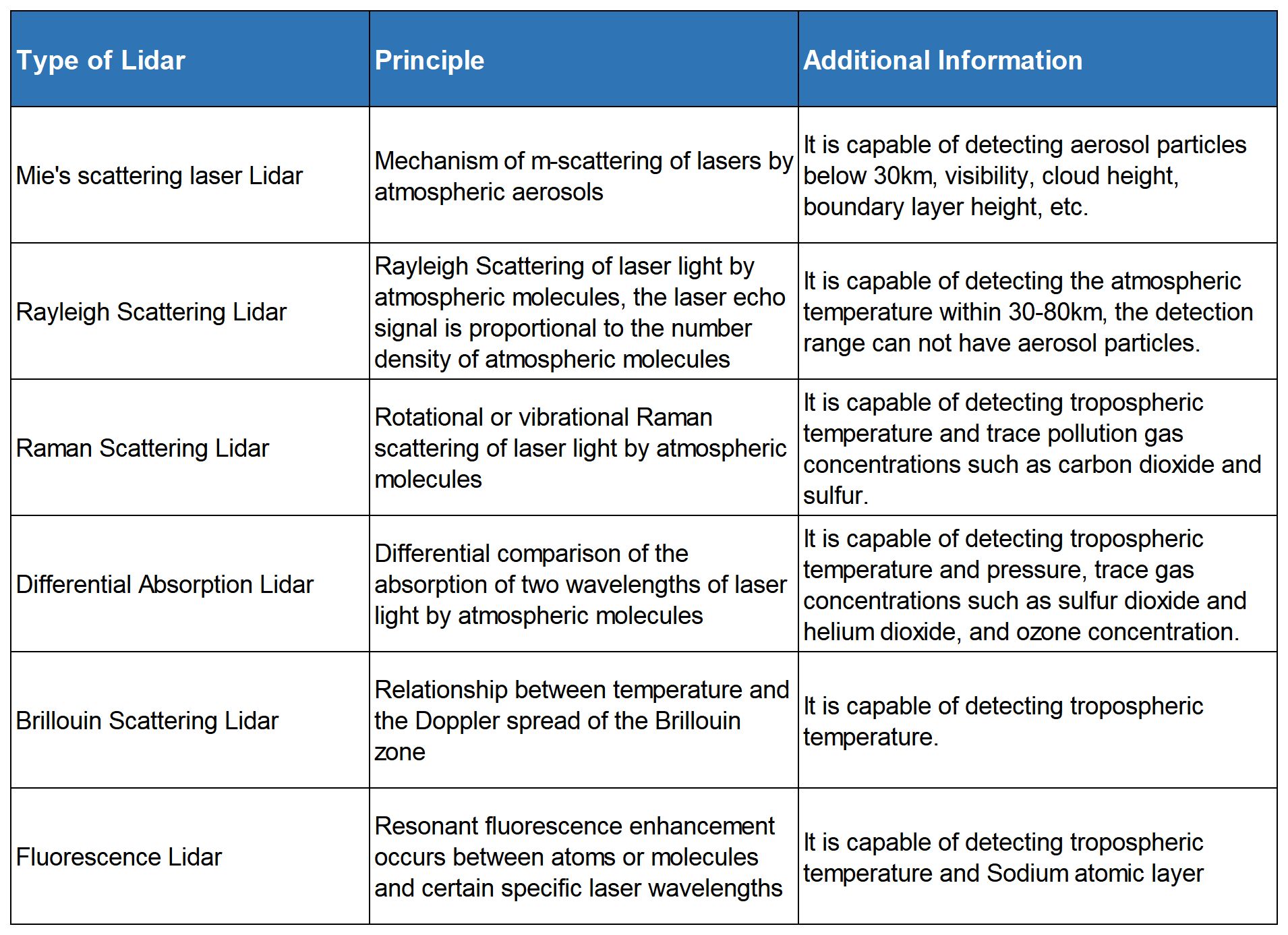
लिडारचे प्रकार खालील तक्त्यात दाखवले आहेत:
वातावरणीय शोध पद्धती
वातावरणीय शोधण्याच्या मुख्य पद्धती आहेत: मायक्रोवेव्ह रडार ध्वनी पद्धत, हवेतील किंवा रॉकेट ध्वनी पद्धत, ध्वनी बलून, उपग्रह रिमोट सेन्सिंग आणि LIDAR. मायक्रोवेव्ह रडार लहान कण शोधू शकत नाही कारण वातावरणात पाठवलेले मायक्रोवेव्ह मिलिमीटर किंवा सेंटीमीटर लाटा असतात, ज्यांची तरंगलांबी लांब असते आणि ते लहान कणांशी, विशेषतः विविध रेणूंशी संवाद साधू शकत नाहीत.
हवेतून आणि रॉकेटमधून ध्वनी काढण्याच्या पद्धती अधिक महाग असतात आणि त्या दीर्घकाळ निरीक्षण करता येत नाहीत. फुग्यांमधून ध्वनी काढण्याचा खर्च कमी असला तरी, वाऱ्याच्या वेगामुळे त्यांच्यावर जास्त परिणाम होतो. उपग्रह रिमोट सेन्सिंगद्वारे ऑन-बोर्ड रडार वापरून जागतिक वातावरण मोठ्या प्रमाणात शोधता येते, परंतु अवकाशीय रिझोल्यूशन तुलनेने कमी असते. वातावरणात लेसर बीम उत्सर्जित करून आणि वातावरणातील रेणू किंवा एरोसोल आणि लेसरमधील परस्परसंवाद (विखुरणे आणि शोषण) वापरून वातावरणीय मापदंड मिळविण्यासाठी लिडारचा वापर केला जातो.
लेसरची मजबूत दिशात्मकता, कमी तरंगलांबी (मायक्रॉन वेव्ह) आणि अरुंद पल्स रुंदी आणि फोटोडिटेक्टर (फोटोमल्टीप्लायर ट्यूब, सिंगल फोटॉन डिटेक्टर) ची उच्च संवेदनशीलता यामुळे, लिडार उच्च अचूकता आणि वातावरणीय पॅरामीटर्सचे उच्च स्थानिक आणि ऐहिक रिझोल्यूशन शोध प्राप्त करू शकते. त्याच्या उच्च अचूकतेमुळे, उच्च स्थानिक आणि ऐहिक रिझोल्यूशन आणि सतत देखरेखीमुळे, LIDAR वातावरणीय एरोसोल, ढग, वायू प्रदूषक, वातावरणीय तापमान आणि वाऱ्याचा वेग शोधण्यात वेगाने विकसित होत आहे.
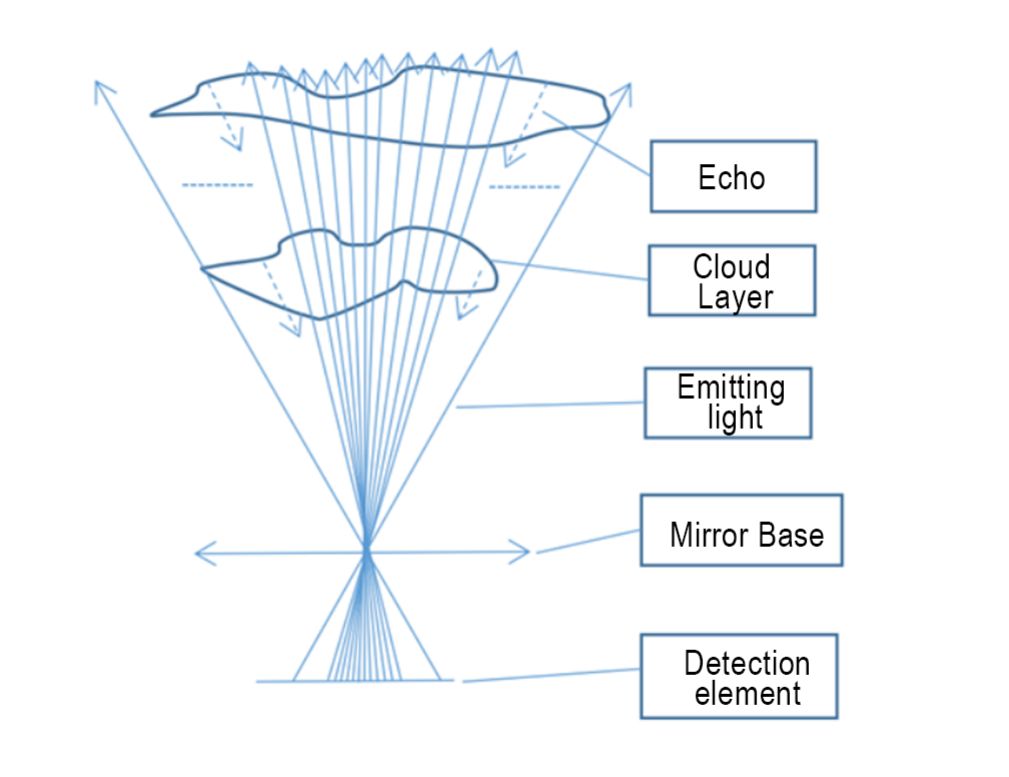
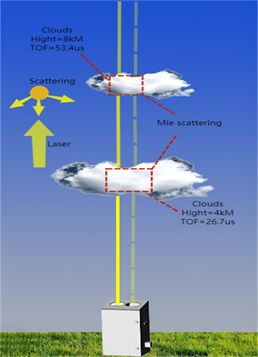
क्लाउड मापन रडारच्या तत्त्वाचे योजनाबद्ध आकृती
ढगांचा थर: हवेत तरंगणारा ढगांचा थर; उत्सर्जित प्रकाश: विशिष्ट तरंगलांबी असलेला एक संयुग्मित किरण; प्रतिध्वनी: ढगांच्या थरातून उत्सर्जन झाल्यानंतर निर्माण होणारा बॅकस्कॅटर सिग्नल; आरशाचा आधार: दुर्बिणीच्या प्रणालीचा समतुल्य पृष्ठभाग; शोध घटक: कमकुवत प्रतिध्वनी सिग्नल प्राप्त करण्यासाठी वापरले जाणारे फोटोइलेक्ट्रिक उपकरण.
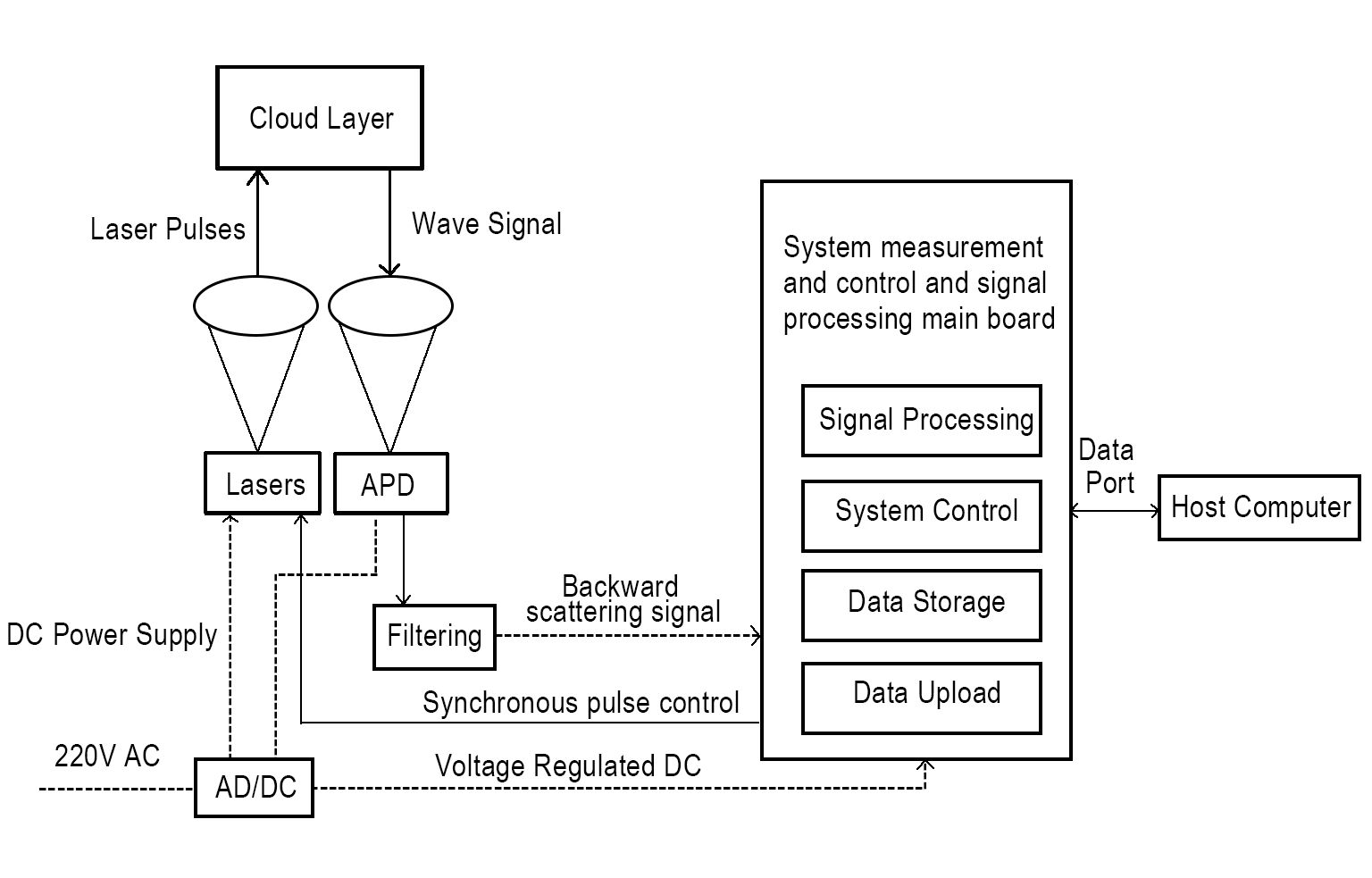
क्लाउड मापन रडार प्रणालीची कार्यरत चौकट
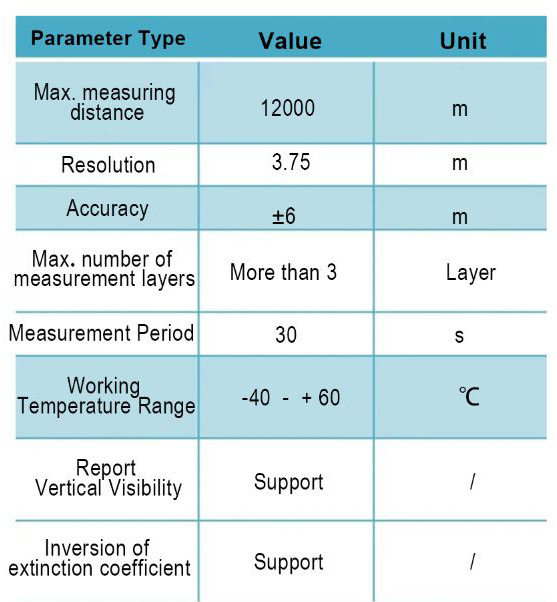
लुमिस्पॉट टेक क्लाउड मापन लिडारचे मुख्य तांत्रिक पॅरामीटर्स
उत्पादनाची प्रतिमा

अर्ज

उत्पादनांच्या कामकाजाच्या स्थितीचा आकृती
पोस्ट वेळ: मे-०९-२०२३